SEED C2
Sensor Event Engine for Dispatch
What It Does
SEED receives alerts from sensors over Reticulum, logs them, pushes updates to a TAK server, and can trigger automated actions, from activating a relay node to deploying a drone via MAVLink.
The software is free. Sensor blueprints and drone integration guides are sold separately.
Current Status
First physical sensor operational. An ESP32 PIR sensor running native LXMF over Reticulum sends motion events to the dashboard in real-time.
The dashboard includes nine views with WebSocket updates, bidirectional TAK sync over mTLS, sensor lifecycle tracking, heartbeat monitoring, and event filtering. Battery and signal strength are logged. Authentication and command dispatch are working.
Next: physical relay nodes with ARM/FIRE/SAFE control, LoRa transport for standalone operation, and SEED Pod with Coral computer vision.
How It Works
Sensors send LXMF messages to SEED over Reticulum. SEED routes events through an action engine that checks conditions and executes responses. One sensor event can arm a relay, send an alert, dispatch a drone, and push a marker to TAK.
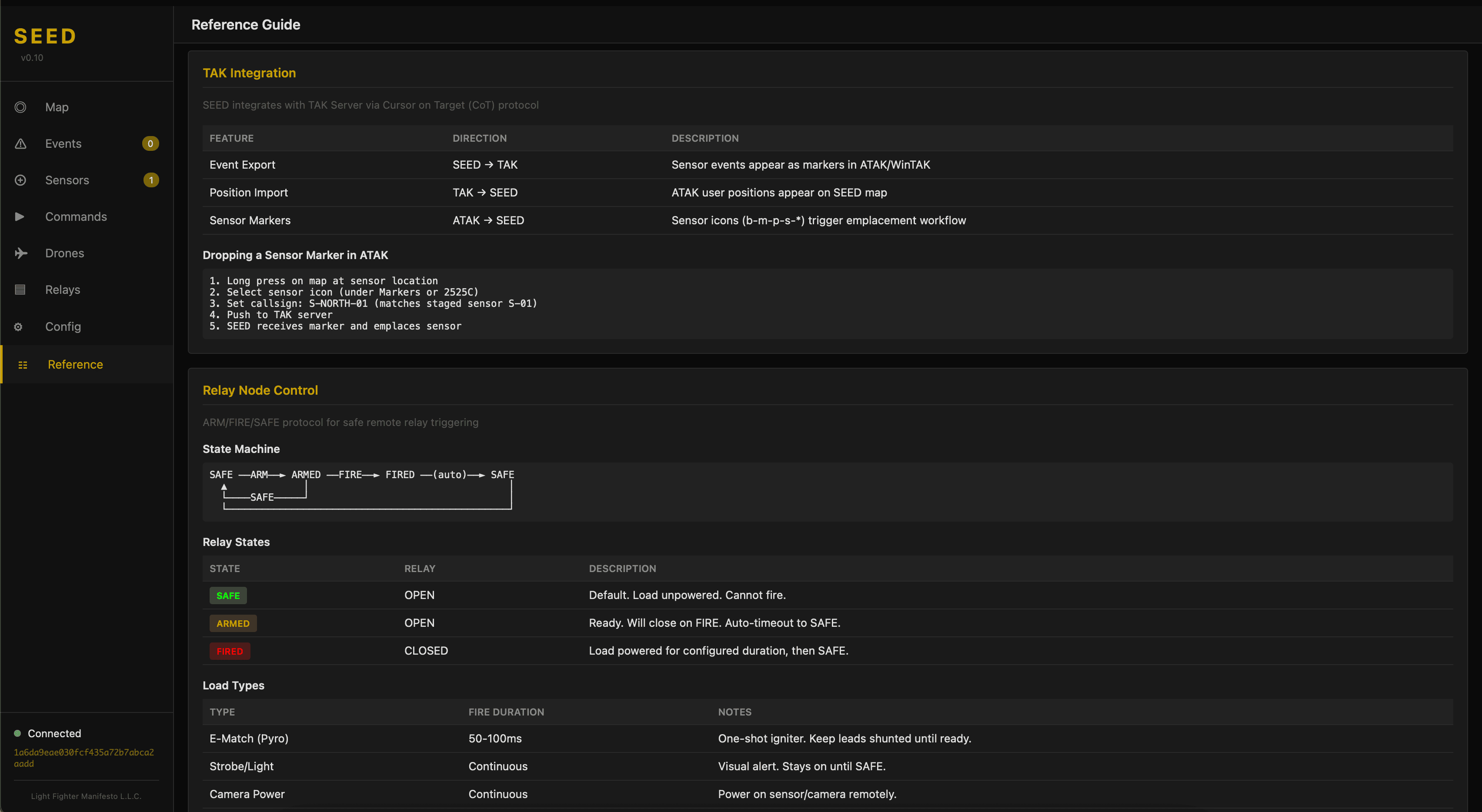
SEED talks to TAK servers over CoT with mTLS. Events appear as alerts in ATAK. Sensor positions show as markers. Commands can be sent to sensors by dropping markers in ATAK.
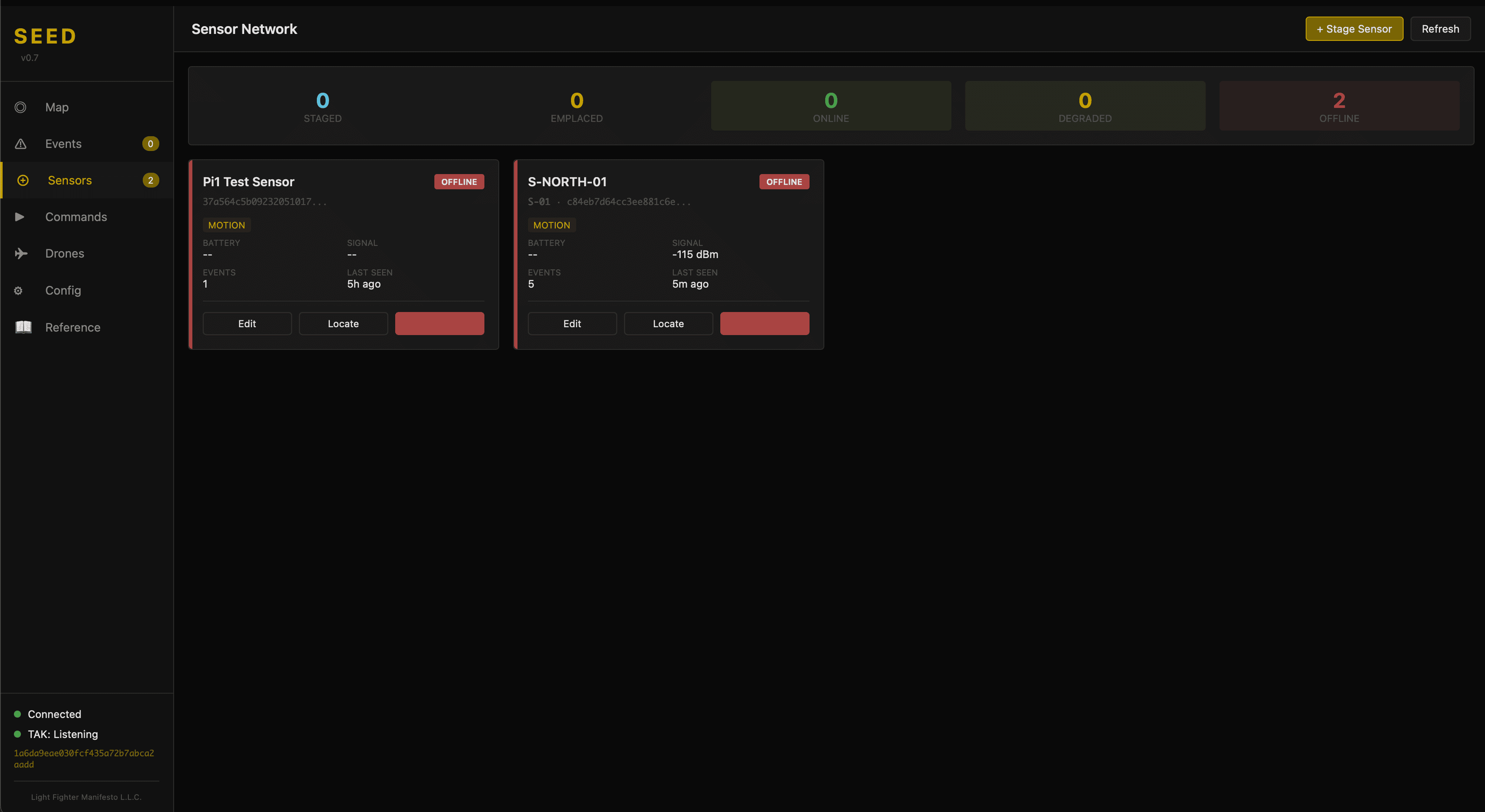
Sensor Lifecycle
Sensors move through five states. STAGED sensors are pre-registered before deployment with hash and short code. When the ground team drops a TAK marker at the sensor location, SEED matches the callsign and marks it EMPLACED. Once the sensor sends an LXMF message, it goes ONLINE. A missed heartbeat triggers DEGRADED status. No contact within timeout means OFFLINE.
Relay Nodes
Relay nodes receive ARM, FIRE, and SAFE commands over LXMF and control physical outputs. Relays start in SAFE. ARM readies them. FIRE closes the circuit. After firing or timeout, they return to SAFE.
Supported outputs include e-match igniters with configurable pulse duration, strobes and lights that stay on until SAFE, and camera power control.
Drone Control
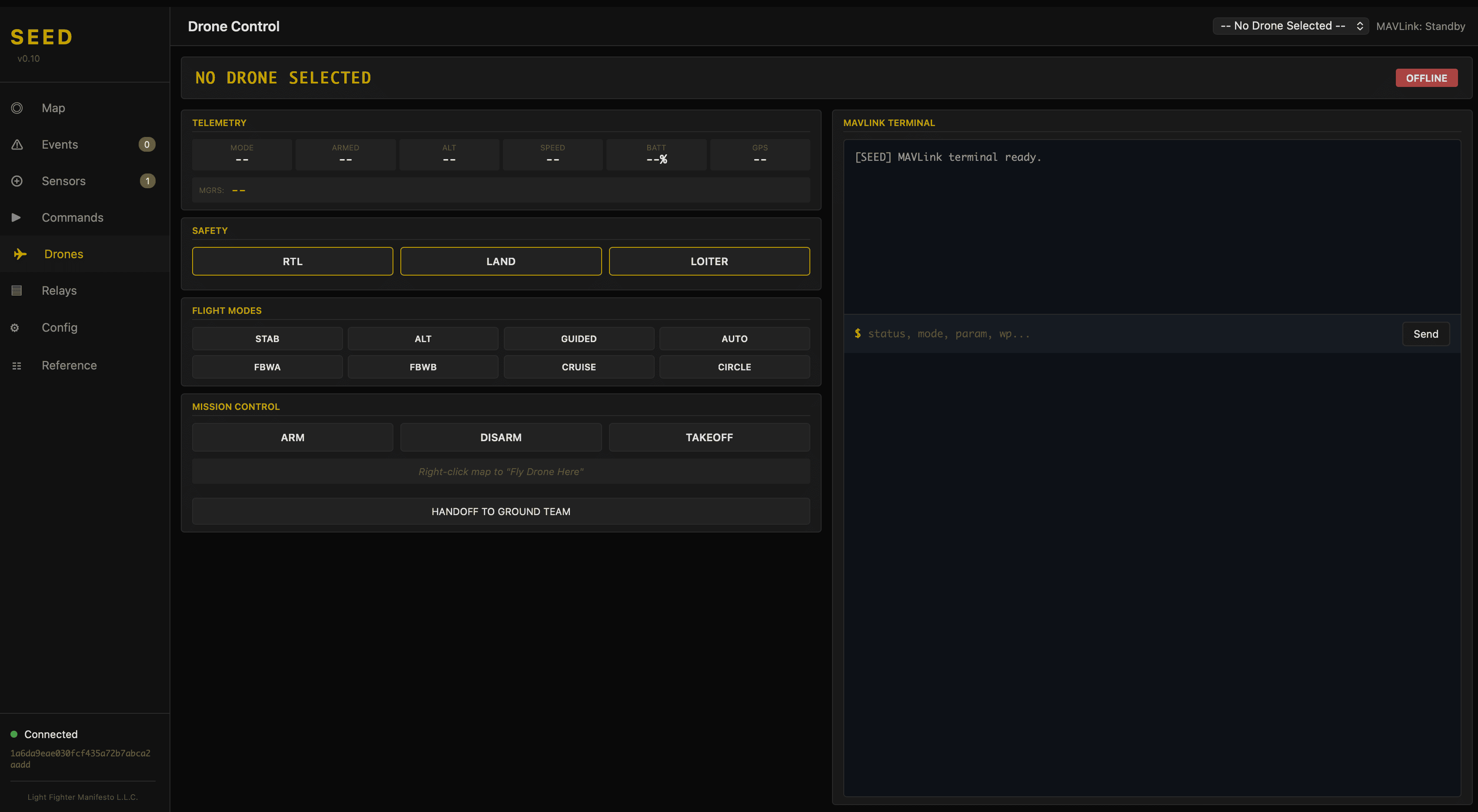
SEED sends MAVLink commands to ArduPilot flight controllers through a companion computer. HIGH_LATENCY2 keeps telemetry small enough for low-bandwidth links.
Safety controls include RTL, LAND, and LOITER. Flight modes cover STAB, ALT, GUIDED, AUTO, FBWA, FBWB, CRUISE, and CIRCLE. Mission control handles ARM, DISARM, TAKEOFF, and handoff to ground teams. A MAVLink terminal allows direct commands.
SEED Pod
SEED Pod runs on edge nodes with local compute. Camera and ML inference run on the device. When the Pod detects something, it decides what to do without waiting for network connectivity. It reports to SEED Core when links are available.
Sensors report. Pods decide.
Dashboard
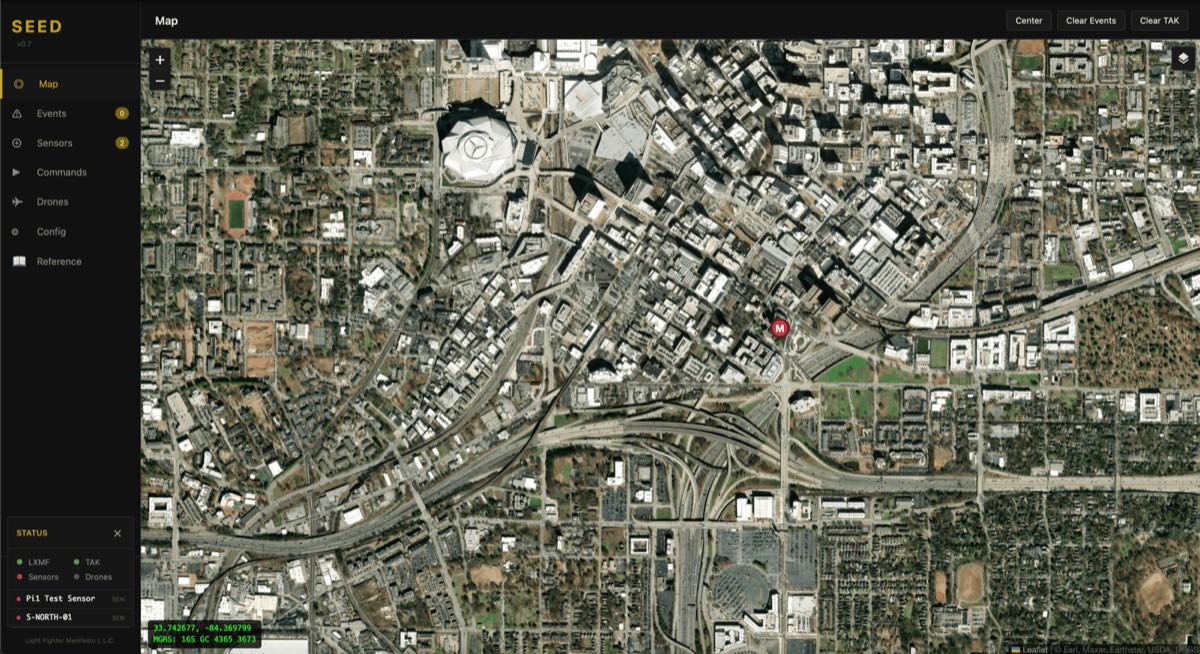
Nine views: Map, Events, Sensors, Commands, Drones, Relays, Messages, Alerts, Log.
Map supports multiple base layers and MGRS coordinates. Online sensors display in the sidebar for quick navigation. Events view filters by type with counts. Sensors view handles bulk CSV import with validation. Relays view controls ARM/FIRE/SAFE state. Log view shows system messages for debugging.
Requirements
Runs on Linux (x86 or ARM) with Python 3.9+ and Reticulum.
Sensor Blueprints
The software is free. The sensor blueprints package includes build guides, wiring diagrams, parts lists, and firmware for sensors and relay nodes.
Price: $10 USD equivalent in Monero (XMR)
Related
Reticulum Field Reference for setup guides. ReticulumHF for HF radio gateway.
References
Reticulum Network Stack, LXMF Protocol, RNode Firmware, FreeTAKServer, TAK Product Center, ArduPilot, Google Coral.
Status
In field testing. Not yet available for purchase.
Contact for development updates or early access inquiries.
Contact